Warm-start, búsqueda local y vecindarios: cómo nuestro motor reoptimiza las rutas de forma continua

Blog > Optimización de rutas > Warm-start, búsqueda local y vecindarios: cómo nuestro motor reoptimiza las rutas de forma continua
Warm-start, búsqueda local y vecindarios: cómo nuestro motor reoptimiza las rutas de forma continua
Publicado en 1 de junio de 2026 • Lectura: 8 min read
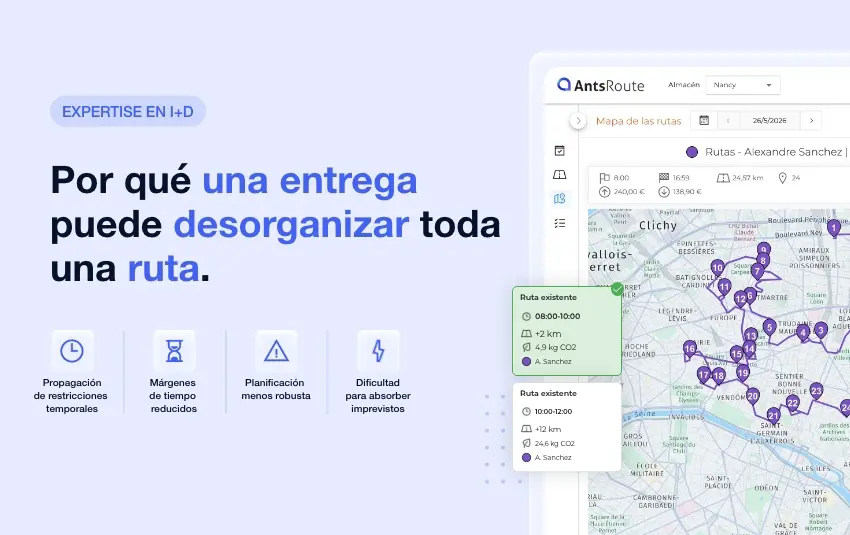
En los problemas de optimización de rutas, generar una primera solución rara vez es el principal reto. La verdadera dificultad aparece cuando la planificación debe evolucionar ante eventos operativos como añadir una nueva tarea, un retraso, una cancelación, un cambio en la solicitud del cliente, la reasignación de un vehículo o incluso la saturación local de una ruta.
En este contexto, el motor no trabaja sobre un problema inicial. Debe adaptar un sistema ya construido, ya sujeto a restricciones y a menudo ya parcialmente optimizado, preservando en la medida de lo posible su calidad global. Precisamente esta capacidad para hacer evolucionar eficazmente una planificación existente es lo que distingue los problemas de optimización dinámica de los enfoques teóricos más clásicos.
Este artículo se centra deliberadamente en los mecanismos de reoptimización utilizados en los motores de rutas dinámicas: warm-start, búsqueda local, vecindarios y heurísticas de exploración. Para una visión más global de los retos de optimización de rutas en la logística de última milla, también puede consultar nuestro artículo completo sobre la optimización de rutas.
En las operaciones reales, un motor eficiente no puede empezar desde cero ante cada evento. Los algoritmos de optimización deben ser capaces de reoptimizar localmente una planificación viva sin desestabilizar innecesariamente las rutas existentes.
En AntsRoute, esta problemática está en el centro de la arquitectura del motor de optimización.
En este artículo veremos:
- Por qué empezar desde cero no es viable en tiempo real
- El papel del warm-start en las rutas dinámicas
- Por qué una inserción debe evaluarse de forma global
- Cómo funciona la búsqueda local
- Por qué no todos los vecindarios merecen el mismo nivel de exploración
- First-improvement vs. Best-improvement: dos estrategias de optimización
- Por qué los métodos exactos alcanzan rápidamente sus límites
Por qué empezar desde cero rara vez es una buena estrategia
En teoría, reconstruir por completo la planificación después de cada modificación podría parecer el mejor enfoque. En la práctica, esta estrategia se vuelve rápidamente inviable debido a la explosión del número de soluciones que deben explorarse, los tiempos de cálculo que implica y la inestabilidad que genera para las operaciones sobre el terreno.
Como explica Ammar Oulamara, responsable de I+D en AntsRoute:
«Un motor en tiempo real no puede reconstruir completamente las rutas ante cada nuevo evento. El coste computacional y la inestabilidad generada serían demasiado elevados.»
Precisamente por esta razón, los motores modernos utilizan enfoques de warm-start.
Warm-start: partir de una solución ya optimizada
El principio del warm-start consiste en utilizar la planificación actual como punto de partida para la optimización. En lugar de buscar una solución completamente nueva, el motor intenta mejorar localmente una solución que ya es coherente, limitando al mismo tiempo las degradaciones que podrían afectar al equilibrio global del sistema.
Este enfoque ofrece varias ventajas importantes:
- reducción drástica del espacio de búsqueda;
- mantenimiento de una buena estabilidad operativa;
- tiempos de respuesta compatibles con las exigencias del tiempo real;
- y limitación de las reorganizaciones innecesarias.
Como señala Ammar Oulamara:
«El warm-start permite al motor concentrar su potencia de cálculo en las zonas realmente afectadas por una modificación de la planificación.»
Esta lógica cambia profundamente la forma en que se explora el problema.
Una inserción nunca se evalúa de forma aislada
Cuando se inserta una nueva tarea τ, el motor no se limita a evaluar su coste marginal inmediato. De hecho, esta inserción puede tener repercusiones sobre toda la planificación al modificar:
- las restricciones temporales;
- los márgenes de seguridad;
- el equilibrio entre rutas;
- la capacidad futura de reorganización;
- o la compacidad geográfica de la planificación.
Por lo tanto, el motor debe explorar no solo la inserción en sí, sino también las reorganizaciones locales que esta hace posibles posteriormente. Precisamente esta capacidad para mejorar una solución existente es la función de los mecanismos de búsqueda local.
La búsqueda local: explorar el vecindario de una solución
En los problemas de rutas, es imposible explorar de forma exhaustiva todas las soluciones posibles. Por ello, los motores modernos trabajan principalmente mediante la exploración de vecindarios.
El principio es sencillo:
- partir de una solución existente;
- aplicar localmente determinadas transformaciones;
- y medir si la nueva solución mejora la planificación.
En AntsRoute, el algoritmo de búsqueda local se basa en varios operadores que permiten explorar eficazmente estos vecindarios.
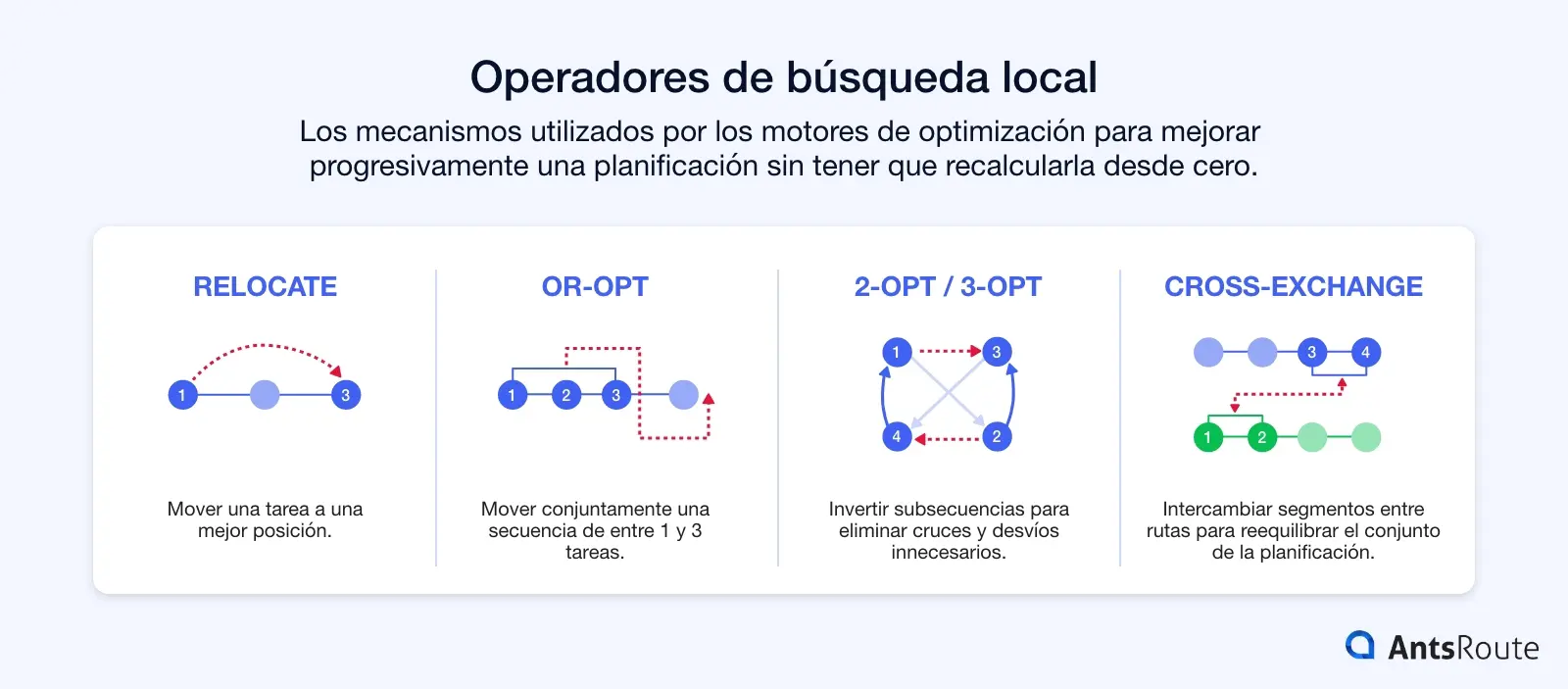
Los operadores de búsqueda local en la optimización de rutas.
Relocate: mover una tarea a una mejor posición
El operador relocate es uno de los mecanismos más fundamentales de la búsqueda local. Consiste en retirar una tarea de una ruta para reinsertarla en otra posición, ya sea dentro de la misma ruta o en una ruta diferente.
Esta operación permite, entre otras cosas:
- recuperar márgenes temporales;
- equilibrar las cargas de trabajo;
- o reducir determinados efectos de propagación.
En los sistemas dinámicos, relocate suele desempeñar un papel central en las reoptimizaciones rápidas, ya que permite mejorar localmente una planificación con un coste computacional relativamente bajo.
Or-opt: mover secuencias de tareas
En algunos casos, mover una sola tarea no es suficiente para restablecer un buen equilibrio en la planificación. El motor utiliza entonces operadores del tipo Or-opt, que consisten en desplazar una secuencia de 1, 2 o 3 tareas consecutivas hacia otra posición dentro de la ruta o de la planificación.
Este enfoque resulta especialmente útil cuando:
- varias tareas presentan una fuerte coherencia geográfica;
- o cuando una reorganización local requiere preservar ciertas continuidades dentro de la ruta.
Como explica Ammar Oulamara:
«Mover un grupo coherente de tareas puede, en ocasiones, restablecer el equilibrio de la planificación de forma mucho más eficaz que una serie de modificaciones aisladas.»
2-opt y 3-opt: reestructurar la geografía de las rutas
Los operadores 2-opt y 3-opt persiguen un objetivo diferente. Consisten en invertir determinadas subsecuencias de una ruta para mejorar su estructura geográfica.
Estos mecanismos permiten, entre otras cosas:
- eliminar cruces innecesarios;
- mejorar la compacidad geográfica;
- o reducir los desvíos innecesarios.
Son especialmente eficaces cuando:
- las rutas se vuelven fragmentadas;
- o cuando una serie de inserciones sucesivas deteriora progresivamente su estructura espacial.
Incluso en sistemas fuertemente condicionados por restricciones temporales, la calidad geográfica de las rutas sigue siendo un elemento esencial para garantizar la solidez operativa.
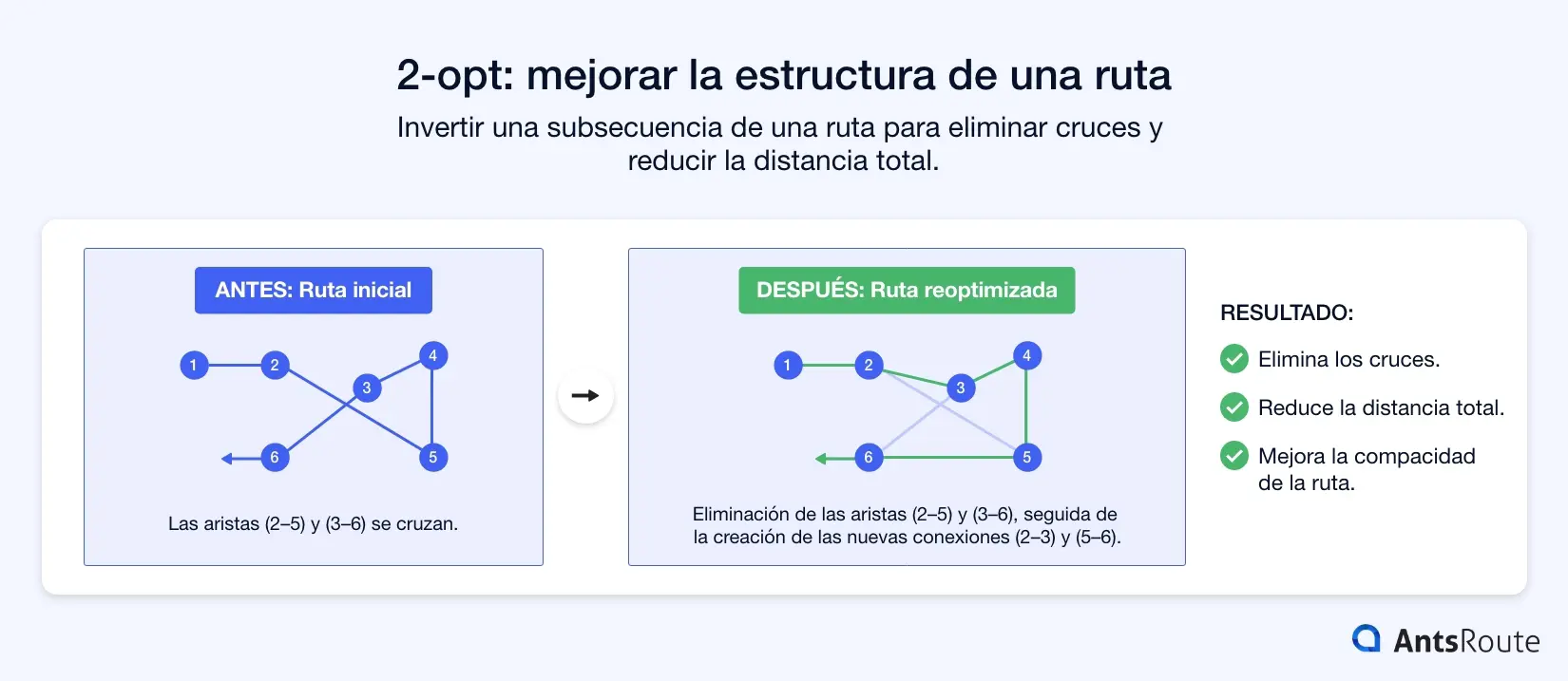
Ejemplo de aplicación del operador 2-opt: dos aristas cruzadas se sustituyen por nuevas conexiones para eliminar el cruce y reducir los desvíos.
Cross-exchange: reequilibrar varias rutas simultáneamente
En sistemas con fuertes restricciones, algunas inserciones no pueden absorberse mediante simples ajustes locales. En estos casos, el motor debe reorganizar simultáneamente varias rutas utilizando operadores de cross-exchange, que consisten en intercambiar segmentos completos entre rutas para restablecer un mejor equilibrio global.
Estos mecanismos resultan especialmente útiles cuando:
- determinados recursos críticos se acercan a la saturación;
- varias rutas se vuelven temporalmente frágiles;
- las posibilidades de reorganización local empiezan a agotarse.
En estas situaciones, el motor deja de razonar únicamente a escala de una ruta aislada y pasa a considerar el conjunto de la planificación para identificar los reequilibrios más relevantes.
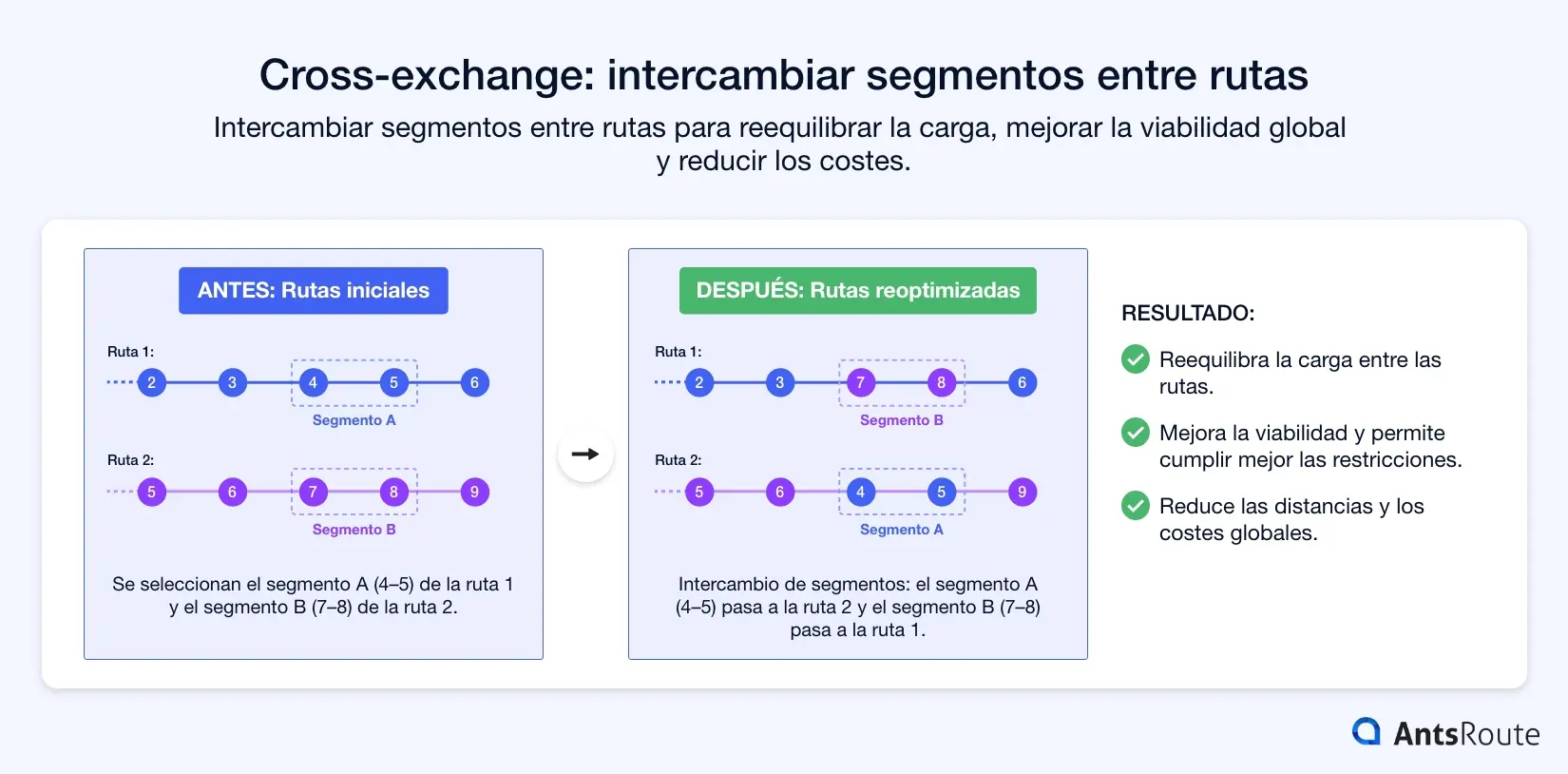
Ejemplo de cross-exchange: intercambio de segmentos entre dos rutas para distribuir mejor las intervenciones y mejorar la eficiencia global de la planificación.
No todos los vecindarios merecen el mismo coste computacional
Explorar en profundidad cada inserción candidata sería demasiado costoso desde el punto de vista computacional. Por ello, el motor debe priorizar sus esfuerzos y concentrar su capacidad de cálculo en las soluciones más prometedoras. En AntsRoute, esta exploración se basa en una jerarquía de vecindarios que permite adaptar progresivamente la profundidad de búsqueda en función de la calidad de las inserciones evaluadas.
Vecindario de grado 1
El primer nivel de vecindario se basa únicamente en modificaciones locales simples realizadas dentro de una misma ruta. El objetivo es filtrar rápidamente las inserciones claramente desfavorables, limitando al mismo tiempo el coste computacional.
Vecindario de grado 2
En esta etapa, el motor permite intercambios entre rutas, así como reequilibrios más amplios. Esta exploración permite evaluar las consecuencias globales de determinadas inserciones e identificar mejoras que no serían visibles a escala de una sola ruta.
Vecindario de grado 3
El tercer nivel de vecindario permite reorganizaciones mucho más profundas, que pueden incluir reestructuraciones de varios días o modificaciones significativas de la planificación. Estas exploraciones, más costosas, se reservan para las inserciones más prometedoras o para situaciones especialmente restrictivas.
Esta jerarquía de vecindarios permite asignar de forma inteligente la capacidad de cálculo, adaptando la profundidad de búsqueda a la calidad de las soluciones encontradas.
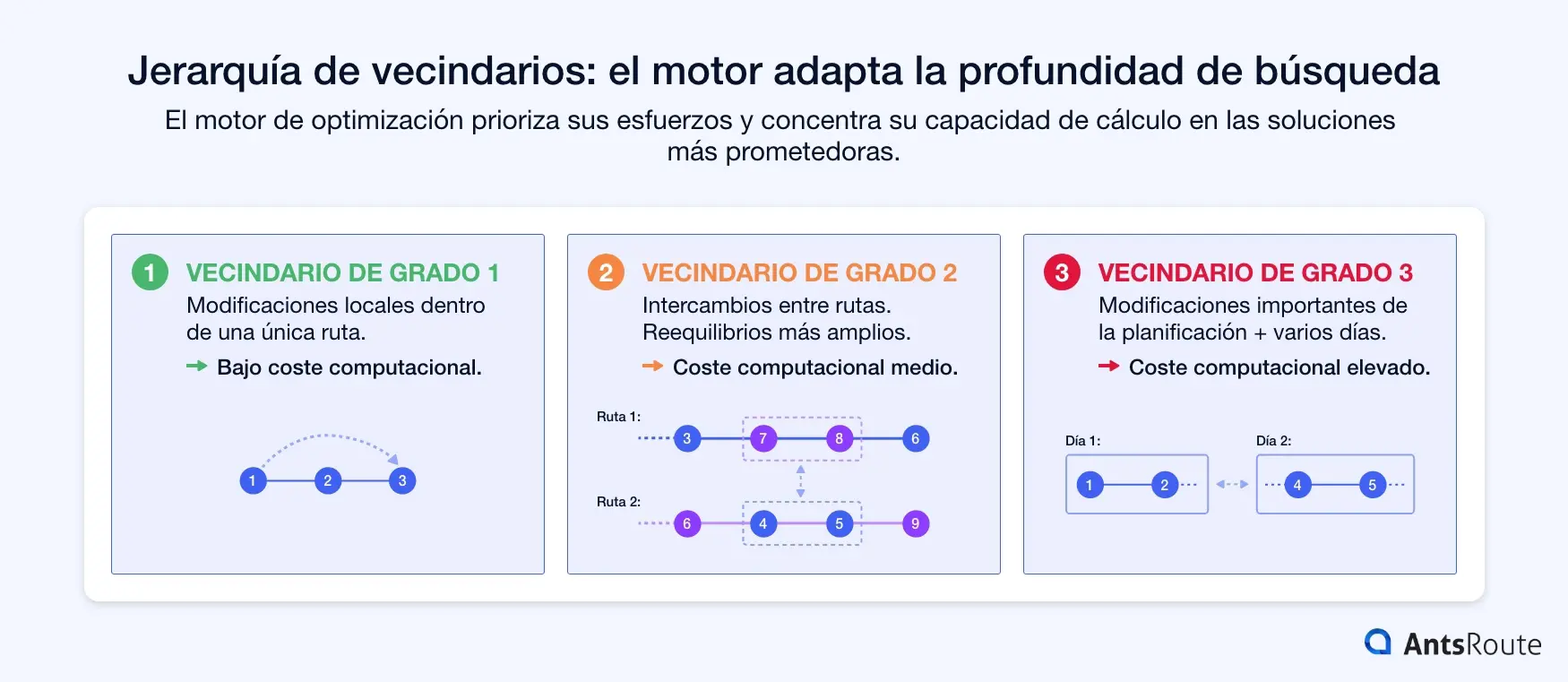
El motor explora progresivamente vecindades cada vez más amplias para concentrar su capacidad de cálculo en las soluciones más prometedoras.
First-improvement vs Best-improvement
Una de las decisiones más importantes en la búsqueda local se refiere a la estrategia utilizada para explorar el vecindario de una solución. Generalmente se emplean dos enfoques principales: first-improvement y best-improvement.
First-improvement
Con la estrategia first-improvement, el motor acepta la primera mejora que encuentra durante la exploración. Este enfoque presenta varias ventajas:
- convergencia rápida;
- bajo coste computacional;
- buena eficacia en las primeras fases de exploración.
Best-improvement
Por el contrario, la estrategia best-improvement consiste en explorar todo el vecindario antes de seleccionar la mejor mejora disponible.
Por lo general, permite:
- obtener una solución de mayor calidad;
- explorar con mayor profundidad las posibilidades de optimización.
A cambio, su coste computacional es significativamente más elevado.
Como explica Ammar Oulamara:
«La elección entre first-improvement y best-improvement depende en gran medida de la densidad de la planificación y del presupuesto computacional disponible.»
En AntsRoute, el motor alterna dinámicamente entre estas dos estrategias en función de la calidad de las soluciones observadas, el nivel de convergencia alcanzado y el grado de saturación de la planificación.
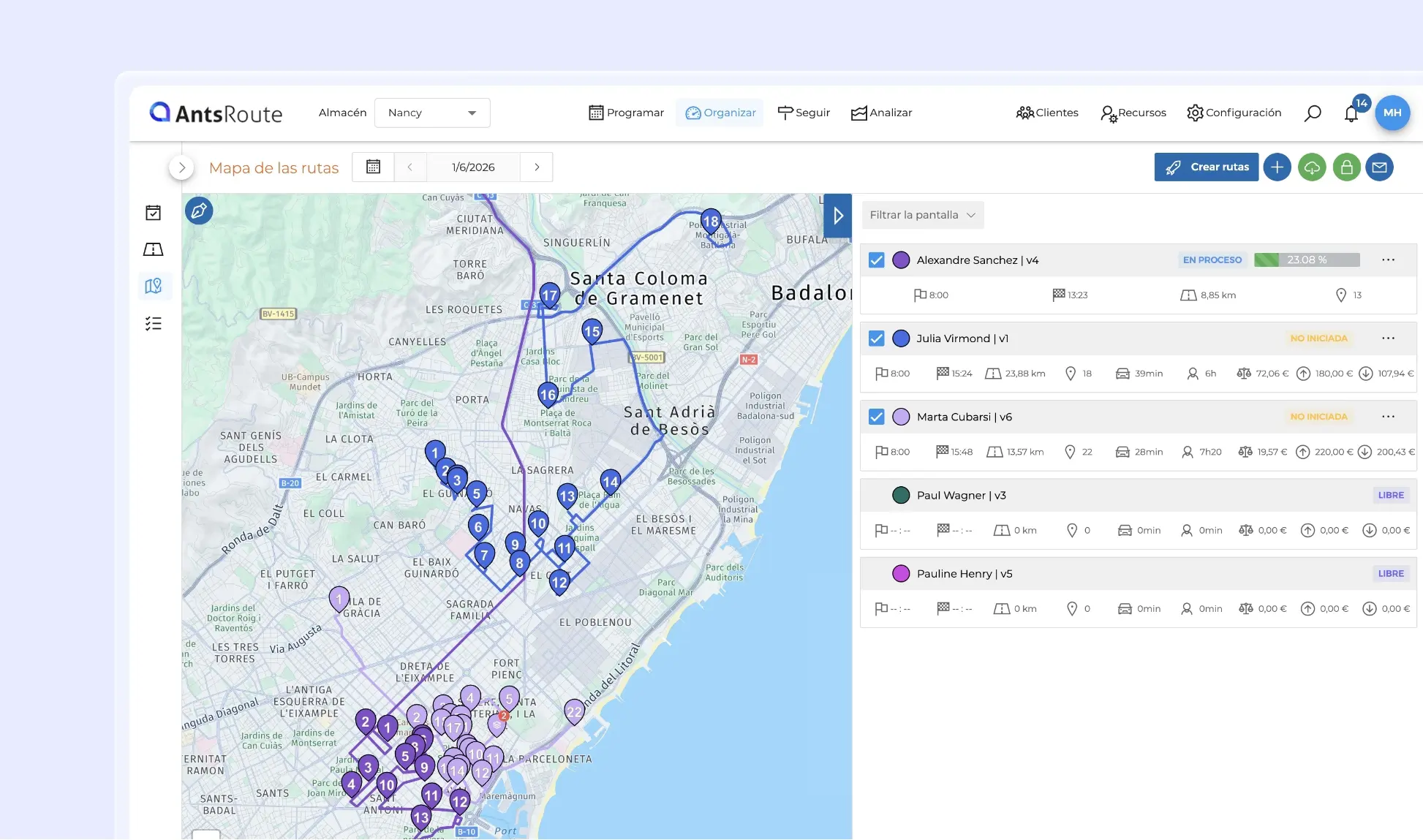
Vista general de las rutas y los recursos en AntsRoute, que permite identificar desequilibrios de carga y reoptimizar rápidamente la planificación a escala global.
Por qué los métodos exactos alcanzan rápidamente sus límites
Los problemas de rutas dinámicas pertenecen a una clase de problemas combinatorios especialmente complejos. A medida que aumentan las restricciones, las rutas se vuelven más densas y los eventos en tiempo real son más frecuentes, el tamaño del espacio de búsqueda crece considerablemente. En este contexto, los métodos exactos se vuelven rápidamente incompatibles con las exigencias operativas, tanto en términos de tiempo de cálculo como de capacidad de respuesta.
Como recuerda Ammar Oulamara:
«El motor no busca la solución teóricamente perfecta. Busca la mejor solución que pueda aplicarse dentro de un tiempo de cálculo compatible con las operaciones.»
Precisamente por esta razón, los motores modernos se apoyan en una combinación de heurísticas, mecanismos de warm-start, operadores de búsqueda local y estrategias de exploración adaptativas para generar rápidamente soluciones robustas y operativamente relevantes.
Conclusión
En los sistemas modernos de optimización de rutas, la dificultad no consiste únicamente en construir una planificación inicial. El verdadero desafío es lograr que evolucione de forma continua sin comprometer su robustez, su estabilidad ni su calidad operativa.
El warm-start, los operadores de búsqueda local y las exploraciones multivecindario permiten responder precisamente a esta problemática. En la logística de última milla, una ruta nunca está completamente definida: debe poder adaptarse constantemente a los cambios sobre el terreno manteniendo al mismo tiempo un alto nivel de rendimiento operativo.
ESCRITO POR

Marie Henrion
En AntsRoute, Marie es responsable de marketing desde 2018. Especializada en la logística de última milla, crea contenidos que hacen accesibles los desafíos complejos de la optimización de rutas, la transición ecológica y la satisfacción del cliente.
Prueba gratuita de 7 días | No se necesita tarjeta de crédito
Contenu
- Por qué empezar desde cero rara vez es una buena estrategia
- Warm-start: partir de una solución ya optimizada
- Una inserción nunca se evalúa de forma aislada
- La búsqueda local: explorar el vecindario de una solución
- Relocate: mover una tarea a una mejor posición
- Or-opt: mover secuencias de tareas
- 2-opt y 3-opt: reestructurar la geografía de las rutas
- Cross-exchange: reequilibrar varias rutas simultáneamente
- No todos los vecindarios merecen el mismo coste computacional
- Vecindario de grado 1
- Vecindario de grado 2
- Vecindario de grado 3
- First-improvement vs Best-improvement
- First-improvement
- Best-improvement
- Por qué los métodos exactos alcanzan rápidamente sus límites
- Conclusión